Design and Experimental Characterization of a Soft Bending Actuator for Morphing Aerofoils
Nov 1, 2023·,,,,,,·
0 min read
Kumeesha De Silva
Sadeep Maduranga
Vikum Chamika
Lakshitha De Silva
Asitha L. Kulasekera
Nalaka Samaraweera
Nirosh D. Jayaweera
Abstract
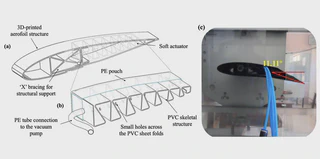
This paper presents the design, simulation, and experimental validation of a vacuum-driven, soft-bending actuator for morphing wing development for small fixed-wing unmanned aerial vehicles (UAVs). The actuator uses an origami-inspired folding mechanism as its control skeleton. A flexible 3D printed structure employing the NACA 2415 aerofoil was used for the development of the morphing aerofoil, driven by the proposed soft actuator. An experimental evaluation of the bending angle and blocking force characteristics of the proposed actuator was conducted. The actuator has achieved a maximum bending angle of 18.75°, while the maximum blocked force at the tip measured 4.8 N at 40kPa (abs) pressure. Furthermore, aerodynamic simulations revealed that increasing the length of the morphing section with respect to the aerofoil length (Morphing Section Ratio: MSR) resulted in elevated $C_l$ and $C_d$, while the maximum $C_l$/$C_d$ values are achieved near the trailing edge morphing. The findings of this study suggest the suitability of soft actuators in the development of flexible morphing wing structures for smallscale UAVs.
Type
Publication
2023 Moratuwa Engineering Research Conference (MERCon)